服務熱線:1751168309217511683092
服務熱線:1751168309217511683092
0 引言
在大型轉動機械的轉速測量工作中,測速探頭搭配測 速齒輪的測速方式是最常用、最成熟的技術方案。測速齒 輪常隨轉動設備一同供貨,更換測速齒輪存在價格昂貴、 定制周期長等問題。此外,部分測速齒輪通過轉動機械的 轉子軸頭銑得,無法更換且修復困難。
1 現(xiàn)存問題描述
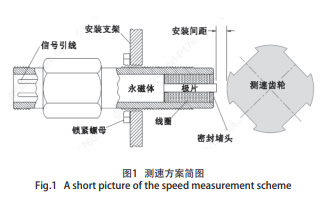
在國內某大型轉機的測速環(huán)節(jié)中,選擇霍爾式傳感器 搭配測速齒輪的技術方案,如圖 1 所示。由于測速齒輪損 傷,測速結果出現(xiàn)大幅波動,測試結果如圖 2 所示。

2 離線試驗
由試驗及現(xiàn)場應用經(jīng)驗,電渦流探頭在試件損傷的情 況下測速結果較好。將試件安裝至轉速校驗 臺上,安裝測速探頭,并將測速探頭分別接至測速裝置和 快速記錄儀;測速裝置通過以太網(wǎng)連接至調試筆記本,實 時監(jiān)測實測轉速。通過調試筆記本的轉速曲線和快速記錄 儀的探頭波形記錄曲線,用以分析試件損傷、校驗臺轉速 以及不同探頭類型對測速結果的影響。由于電渦流探頭測速結果良好,為對比分析,將電渦 流探頭和霍爾探頭同時接進轉速測量裝置進行試驗,當?shù)娃D速時,轉速測量裝置無法檢測 MPU 的有效信號, 故轉速恒為 0RPM ;當轉速升至 1500RPM 時,轉速測量裝 置可以檢測 MPU 的有效信號, 但轉速波動較大。當實際轉 速為 1500RPM 時,測速結果偏差約為 ±80RPM。隨著轉 速的升高,測速誤差逐漸減小。至 3000RPM 時,測速誤差 約為 ±5RPM。
3 原因分析
MPU 的測量原理為磁 / 電感應,即當穿過線圈的磁通 變化時,線圈會感應出電壓,且磁通變化越快,感應電壓 越大。由于磁通的變化率可通過轉速體現(xiàn),故轉速越快, 輸出電壓越大。轉速測量裝置中 MPU 測速通道的有效電壓為 1Vrms ~ 35Vrms。當?shù)娃D速時,由于磁通變化率小,感應電壓較 低,故轉速測量裝置無 MPU 的測量轉速;隨著實際轉速的 逐漸升高,感應電壓逐漸增大,當某一齒對應的感應電壓 超過最低值時,轉速測量裝置的 MPU 監(jiān)測通道能夠測量到 轉速信號。MPU 處試件凹面的示意圖如圖 11A 所示。由于凹面為 平面, 故當探頭軸線和凹面垂直時磁通最小,且此時磁通 變化率為 0。由于試件逆時針旋轉,故在此過程中磁通量 先減小后增大,對應感應電動勢由負值變?yōu)檎担瑥亩?成正常過零現(xiàn)象,由于霍爾探頭的輸出波形為邊緣陡峭的頻率信號,故 轉速測量裝置中的閾值調整方法無法完成有效的波形預處 理功能,進而導致轉速測量裝置測量結果波動。前置器通過其內部振蕩器產(chǎn)生高頻電流,通 過延長電纜送至探頭線圈。由于電磁感應,線圈產(chǎn)生交變 磁場并作用于被測體。由于渦流效應,被測體上感應出交 變渦流。交變渦流感應出交變磁場,并反作用于探頭線圈, 引起線圈上交變電流的幅值和相位變化(變化程度受探頭與被測體距離影響)。檢測電路監(jiān)測該幅值和相位變化,經(jīng) 放大器等運算電路得到反映探頭與被測體距離的電壓信號。
4 結論
電渦流探頭為位移測量傳感器,其輸出信號為連續(xù)電 壓信號。其輸出信號經(jīng)轉速測量裝置的預處理環(huán)節(jié)后,能 夠輸出規(guī)整的波形,消除試件缺陷的影響,進而獲得良好 的測速效果。電渦流探頭的缺點為元件數(shù)量多,單一元件損壞可能 影響整體測量功能,故障率較高。霍爾探頭以霍爾元件為核心,體積小、壽命長、靈敏 度高、抗干擾能力強,輸出信號穩(wěn)定。此外,該有源探頭 的測量過程不受轉速影響,能夠實現(xiàn)全轉速范圍內的高精 度轉速波形拾取。
免責聲明:文章僅供學習和交流,如涉及作品版權問題需要我方刪除,請聯(lián)系我們,我們會在第一時間進行處理。
產(chǎn)品中心 | 技術支持 | 下載中心 | 在線留言 | 合作伙伴 | 新聞動態(tài) | 關于其林貝爾 | 聯(lián)系我們 |

Copyright © 2002-2020 上海蟻霖科學儀器有限公司 版權所有
備案號: 滬ICP備19002068號
服務熱線:17511683092
售后電話:17511683092
公司郵箱:yilinkexue@163.com
公司地址:上海浦東新區(qū)金高路2131弄17號401室
 掃一掃進入手機官網(wǎng)
掃一掃進入手機官網(wǎng)
 掃一掃關注我們
掃一掃關注我們